In linear algebra rotations are represented by matrices, i.e. linear transformations
How do you formally prove that rotation is a linear transformation?
But this page is very interesting
http://www.euclideanspace.com/maths/geometry/rotations/theory/
it vaguely talks about rotations as being quadratic in the way that the length of a vector is quadratic
then it also shows how a rotation takes in something quadratic and spits out something linear
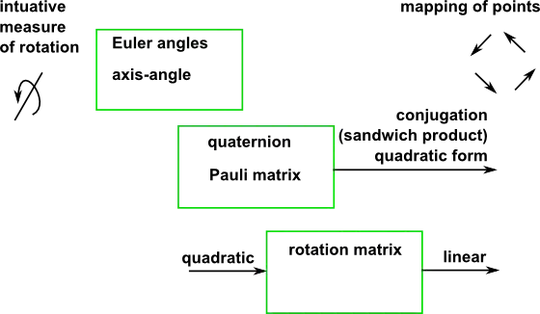
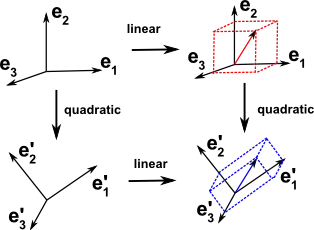
but it also vaguely hints that the 'quadratic-ness' as being encoded in rotating your basis vectors
Is there a way to make all this precise with rigorous linear operators, bilinear and quadratic forms etc...?
It's very hand-wavey, but cool if correct.
I'm guessing this 'quadratic' business means tensors, bilinear forms etc... so I guess they're saying that all the rotation matrices, unitary geometry etc... is properly thought of as part of bilinear algebra rather than linear algebra - make sense?