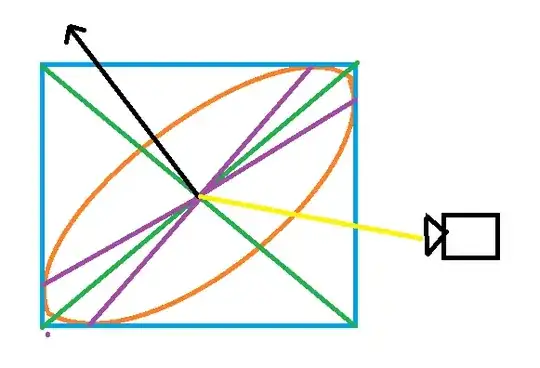
First of all, set up the viewing reference frame, and attach it to the camera. The camera viewing direction and orientation is assumed given, as well as the "focal distance" which is the distance between the center of the camera and the projection plane, which lies between the viewed object and the center of the camera. We can take the center of the camera to be at the origin of the world coordinate frame, and have a reference frame represented by the rotation matrix $V$, so that
$\mathbf{p} = V \mathbf{q} $
where $\mathbf{p}$ is the coordinate vector of a point in $3D$ and $\mathbf{q}$ is the coordinate vector in the camera frame of refence (local frame).
The idea of this solution is as follows: From the image that lies in the projection plane of the camera, connect the origin of the camera to the ellipse that lies in the image plane, and extend these line segments into rays. The collection of the rays forms a cone. Set up a "unknown" plane of the viewed circle. This plane is such that it intersects the cone in a circle, and this circle has a radius of $r$ (which is known).
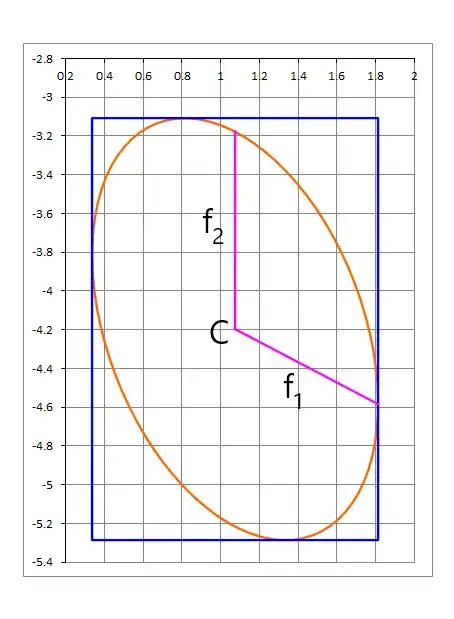
Now, from the given image, we know the $x$ limits, $X_{min}, X_{max}$ and the $y$ limits $Y_{min}, Y_{max}$, and we also know the right touching point $(x_1, y_1)$
From these, the center of the ellipse is
$ \mathbf{C} = (C_x, C_y) = \frac{1}{2} ( X_{min} + X_{max}, Y_{min} + Y_{max} ) $
Using conjugate axes, we define the first conjugate semi-axis as follows
$ \mathbf{f_1} = ( x_1 - C_x , y_1 - C_y ) $
This is a vector pointing from $\mathbf{C}$ to $(x_1, y_1)$. Since the tangent at this point is parallel to the $y$ axis, then the other conjugate semi-axis is
$ \mathbf{f_2} = (0, K) $
So that now, the ellipse is given by
$ \mathbf{E}(t) = \mathbf{C} + \mathbf{f_1} \cos(t) + \mathbf{f_2} \sin(t) $
We can find $K$ from the fact that the maximum $y$ of the ellipse is $Y_{max}$, which implies that
$ Y_{max} = C_y + \sqrt{ (y_1 - C_y)^2 + K^2 } $
And this equation can be easily solved for $K$. ($K$ can be taken as positive or negative).
The ellipse $\mathbf{E}(t)$ coordinates are coordinates in the viewing (projection) plane, whose normal vector is the $Z$ axis of the local coordinate matrix $V$, therefore, in local coordinates, the ellipse is given by
$ \mathbf{q} = \begin{bmatrix} \mathbf{E}(t) \\ \alpha \end{bmatrix} $
$\alpha$ is a constant of the camera that determines the location of the viewing (projection) plane with respect to the center of the camera.
Partitioning $V$ into
$ V = [V_1 , V_2 ] $
where $V_1$ is $3 \times 2$ and $V_2 $ is $3 \times 1 $, we obtain the parametric equation of the ellipse in world coordinates
$ \mathbf{p} = V \mathbf{q} = V_1 \mathbf{E} + \alpha V_2 = V_1 \left(\mathbf{C} + \mathbf{f_1} \cos(t) + \mathbf{f_2} \sin(t) \right) + \alpha V_2 = \mathbf{g_0} + \mathbf{g_1} \cos(t) + \mathbf{g_2} \sin(t)$
The last expression on the right of the above equation can be written in compact form as
$ \mathbf{g_0} + \mathbf{g_1} \cos(t) + \mathbf{g_2} \sin(t) = G \mathbf{w} $
where $ G =\begin{bmatrix} \mathbf{g_1} && \mathbf{g_2} && \mathbf{g_0} \end{bmatrix} $ and $ \mathbf{w} = \begin{bmatrix} \cos(t) \\ \sin(t) \\ 1 \end{bmatrix} $
Hence,
$ \mathbf{p} = G \mathbf{w} $
Note that since $\cos^2(t) + \sin^2(t) - 1 = 0 $ then
$ \mathbf{w}^T Q_0 \mathbf{w} = 0 $, where $Q_0 = \begin{bmatrix} 1 && 0 && 0 \\0 && 1 && 0 \\ 0 && 0 && -1 \end{bmatrix} $
And from this, it follows that the equation of the cone on which $\mathbf{p}$ lies is
$ \mathbf{p}^T G^{-T} Q_0 G^{-1} \mathbf{p} = 0 $
Let $Q = G^{-T} Q_0 G^{-1} $
Diagonalize $Q$ into $Q = R D R^T $, and scale and rearrange diagonal elements of diagonal matrix $D$ (and corresponding vectors in $R$) such that $D$ is of the form
$ D = \begin{bmatrix} D_{11} && 0 && 0 \\ 0 && D_{22} && 0 \\ 0 && 0 && -1 \end{bmatrix} $
with $D_{11} \ge D_{22} \gt 0 $.
The rotation matrix $R$ represents the rotation of the axes of the elliptical cone with respect to the world coordinates. Let $u$ be the position vector of points on the cone surface with respect to this local frame specified by $R$ then
$ \mathbf{p} = R \mathbf{u} $
So that $ \mathbf{u}^T D \mathbf{u} = 0 $
In this frame (the one specified by $R$), we define a plane with normal
$\mathbf{n_0} = [\sin(\theta) \cos(\phi), \sin(\theta) \sin(\phi), \cos(\theta) ]^T $
And such that the plane passes through $\mathbf{u_0} = [0, 0, \beta]^T $
You can convince yourself that the normal vector that will result in a circular section of the cone must have a normal vector that lies in the $x'z'$ plane, i.e. $ \phi = 0 $, and hence
$ \mathbf{n_0} =[\sin(\theta) , 0, \cos(\theta) ]^T $
Two orthogonal unit vectors that span the plane of the circle are
$ \mathbf{u_1} = [\cos(\theta), 0, -\sin(\theta) ]^T $
$ \mathbf{u_2} = [ 0, 1, 0 ]^T $
So that now the equation of the plane is
$ \mathbf{u} = \mathbf{u_0} + [\mathbf{u_1} , \mathbf{u_2}] \mathbf{s} = \mathbf{u_0} + U \mathbf{s} $
where $\mathbf{s} = [s_1, s_2]^T $ is the coordinate vector of a point with respect to the two spanning vectors $\mathbf{u_1}$ and $\mathbf{u_2} $.
Using the above into the equation of the cone in local coordinates, we get
$ \mathbf{u}^T D \mathbf{u} = 0 $
And this leads to
$ (\mathbf{u_0} + U \mathbf{s})^T D (\mathbf{u_0} + U \mathbf{s} ) = 0 $
which expands into
$ \mathbf{u_0}^T D \mathbf{u_0} + 2 \mathbf{s}^T U^T D \mathbf{u_0} + \mathbf{s}^T U^T D U \mathbf{s} = 0 $
The matrix $U^T D U$ is given by
$ U^T D U = \begin{bmatrix} D_{11} \cos(\theta)^2 - \sin(\theta)^2 && 0 \\ 0 && D_{22} \end{bmatrix} $
So, in order to have a circle, we must have these two diagonal elements equal to each other, and hence
$ D_{11} \cos^2(\theta) - \sin(\theta)^2 = D_{22} $
From which we can find $ \theta $ as
$ \theta = \pm \cos^{-1} \left( \sqrt{ \dfrac{ D_{22} + 1 }{D_{11} + 1 } } \right) $
The matrix $U^T D \mathbf{u_0} $ is given by
$ U^T D \mathbf{u_0} = \begin{bmatrix} \beta \sin(\theta) \\ 0 \end{bmatrix} $
and the scalar $\mathbf{u_0}^T D \mathbf{u_0} $ is equal to $ - \beta^2 $.
So that the equation of the circle of intersection becomes
$ D_{22} ( s_1^2 + s_2^2 ) + 2 s_1 \beta \sin(\theta) - \beta^2 = 0 $
Dividing through by $D_{22}$
$ s_1^2 + s_2^2 + 2 s_1 \left(\dfrac{\beta \sin(\theta)}{D_{22}}\right) = \dfrac{\beta^2}{D_{22}} $
Completing the square in $s_1$, the above becomes
$ \bigg( s_1 - \left(- \dfrac{\beta \sin(\theta)}{D_{22}} \right) \bigg)^2 + s_2^2 = \beta^2 \bigg( \dfrac{1}{D_{22}} + \dfrac{\sin(\theta)^2}{D_{22}^2}\bigg)$
Which is a circle centered at $\mathbf{s} = \bigg( - \dfrac{\beta \sin(\theta)}{D_{22}} , 0 \bigg)$ and having the square of radius equal to
$ r^2 = \beta^2 \bigg( \dfrac{1}{D_{22}} + \dfrac{\sin(\theta)^2}{D_{22}^2} \bigg) $
From which, we can determine the unknown $\beta$
$ \beta = \dfrac{r}{ \sqrt{\dfrac{1}{D_{22}} + \dfrac{\sin(\theta)^2}{D_{22}^2}}} $
Now the requested plane normal of the plane of the circle is
$ \mathbf{n} = R \mathbf{n_0} $
where as above
$ \mathbf{n_0} = [ \sin(\theta), 0, \cos(\theta) ] $
And the center of the circle is
$ \mathbf{C} = R \bigg( \mathbf{u_0} + \bigg( - \dfrac{\beta \sin(\theta)}{D_{22}} \bigg) \mathbf{u_1} \bigg) $
So, in summary, there are two possible unit normal vectors to the plane of the circle, each with a corresponding circle center. These two unit normal vectors are generated by taking $\theta$ to be positive in the first case, and negative in the second case.