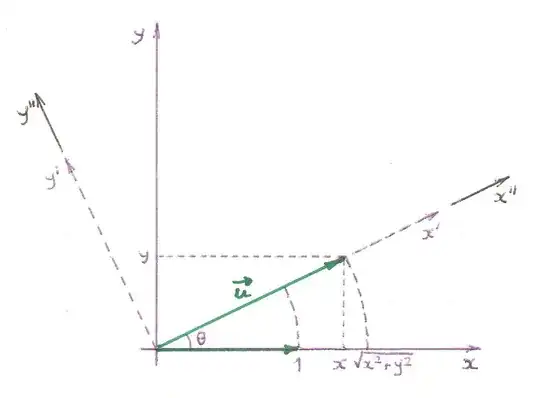
Your problem is equivalent to find the transformation between the $x,y$
coordinates of a point and the $x^{\prime },y^{\prime }$ coordinates of the
same point in a rotated system of coordinates, followed by a multiplication
by the factor $k=1/\sqrt{x^{2}+y^{2}}$, so that $x^{\prime \prime
}=kx^{\prime }=1$ and $y^{\prime \prime }=kx^{\prime }=0$. The rotation
angle should be $\theta =\arctan \frac{y}{x}$.
From trigonometry, we know that
$$
\begin{eqnarray*}
&&\left\{
\begin{array}{c}
x^{\prime }=x\cos \theta +y\sin \theta =\sqrt{x^{2}+y^{2}} \\
y^{\prime }=-x\sin \theta +y\cos \theta =0
\end{array}
\right.
\end{eqnarray*}
$$
and since
$$
\begin{eqnarray*}
\cos \left( \arctan \frac{y}{x}\right) &=&\frac{x}{\sqrt{x^{2}+y^{2}}} \\
\sin \left( \arctan \frac{y}{x}\right) &=&\frac{y}{\sqrt{x^{2}+y^{2}}}, \\
\end{eqnarray*}
$$
we have
$$\begin{eqnarray*}
\left\{
\begin{array}{c}
x^{\prime \prime }=\frac{1}{\sqrt{x^{2}+y^{2}}}x^{\prime }=\frac{x^{2}}{
x^{2}+y^{2}}+\frac{y^{2}}{x^{2}+y^{2}}=1 \\
y^{\prime \prime }=\frac{1}{\sqrt{x^{2}+y^{2}}}y^{\prime }=-\frac{xy}{
x^{2}+y^{2}}+\frac{xy}{x^{2}+y^{2}}=0.
\end{array}
\right.
\end{eqnarray*}
$$
We haven't learned any matrices at school yet.
In matrix notation$^1$
$$
\begin{eqnarray*}
\begin{pmatrix}
x^{\prime \prime } \\
y^{\prime \prime }
\end{pmatrix}
&=&\frac{1}{\sqrt{x^{2}+y^{2}}}
\begin{pmatrix}
x^{\prime } \\
y^{\prime }
\end{pmatrix}
=
\begin{pmatrix}
\frac{x}{x^{2}+y^{2}} & \frac{y}{x^{2}+y^{2}} \\
-\frac{y}{x^{2}+y^{2}} & \frac{x}{x^{2}+y^{2}}
\end{pmatrix}
\begin{pmatrix}
x \\
y
\end{pmatrix}
=
\begin{pmatrix}
1 \\
0
\end{pmatrix}.
\end{eqnarray*}
$$
So
$$
M=
\begin{pmatrix}
\frac{x}{x^{2}+y^{2}} & \frac{y}{x^{2}+y^{2}} \\
-\frac{y}{x^{2}+y^{2}} & \frac{x}{x^{2}+y^{2}}
\end{pmatrix}.
$$
--
$^1$ Product of a $2\times 2$ matrix by a $2\times 1$ matrix
$$
\begin{pmatrix}
a_{11} & a_{12} \\
a_{21} & a_{22}
\end{pmatrix}
\begin{pmatrix}
b_{1} \\
b_{2}
\end{pmatrix}
=
\begin{pmatrix}
a_{11}b_{1}+a_{12}b_{2} \\
a_{21}b_{1}+a_{22}b_{2}
\end{pmatrix}
$$
and product between a scalar $\alpha$ and a $2\times 1$ matrix
$$\alpha
\begin{pmatrix}
c_{1} \\
c_{2}
\end{pmatrix}
=
\begin{pmatrix}
\alpha c_{1} \\
\alpha c_{2}
\end{pmatrix}
$$