Let the displacement of $\mathbf{\vec{{v}_{0}{v}_{1}}}$ be a directed vector from $\mathbf{\vec{v}_{0}}$ to $\mathbf{\vec{v}_{1}}$ defined as
$\left(\mathbf{\vec{v}_{1}}-\mathbf{\vec{v}_{0}}\right)$.
$$\mathtt{\operatorname{Let }}\mathbf{V=\left\{\vec{a},\vec{b}\right\}};$$
"Let $\operatorname{Ortho}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)$ be the orthogonalization of $\mathbf{\vec{a}}$ compared to $\mathbf{\vec{b}}$ about $\mathbf{\vec{0}}$."
$
\mathbf{\forall\vec{a}\forall\vec{b}}\left(\text{Ortho}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)=\mathbf{\vec{a}}-\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\implies\mathbf{\forall\vec{v}}\left(\pm\left(\mathbf{\vec{a}}\times\mathbf{\vec{b}}\right)\cdot\mathbf{\vec{v}}=\mathrm{0}\land\mp\left(\mathbf{\vec{b}}\times\mathbf{\vec{a}}\right)\cdot\mathbf{\vec{v}}=\mathrm{0}\land\mathbf{\vec{v}}\in\mathbf{V}\implies\text{Ortho}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\cdot\mathbf{\vec{v}}=0\land\left(\mathbf{\vec{v}}\in\mathbb{R}^3\implies\text{Ortho}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\in\mathbb{R}^3\right)\right)\right)
$
"Let $\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)$ be the (linear) projection of $\mathbf{\vec{a}}$ onto $\mathbf{\vec{b}}$ about $\mathbf{\vec{0}}$."
$
\mathbf{\forall\vec{a}\forall\vec{b}}\left(\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)=\frac{\mathbf{\vec{a}}\cdot\mathbf{\vec{b}}}{\mathbf{\vec{b}}\cdot\mathbf{\vec{b}}}\mathbf{\vec{b}}\land\mathbf{\vec{b}}\not=\mathbf{\vec{0}}\land\frac{\pi}{2}=
\arccos\left(\frac{\left(\mathbf{\vec{a}}-\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\right)\cdot\left(\mathbf{\vec{b}}-\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\right)}{\Vert\mathbf{\vec{a}}-\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\Vert \Vert\mathbf{\vec{b}}-\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\Vert}\right)\land\left(\mathbf{\vec{b}}\in\mathbb{R}^n\land\mathbf{\vec{a}}\in\mathbb{R}^n\land\mathbf{\vec{0}}\in\mathbb{R}^n\implies\text{Proj}_{\mathbf{\vec{b}}}\left(\mathbf{\vec{a}}\right)\in\mathbb{R}^n\right)\right)
$
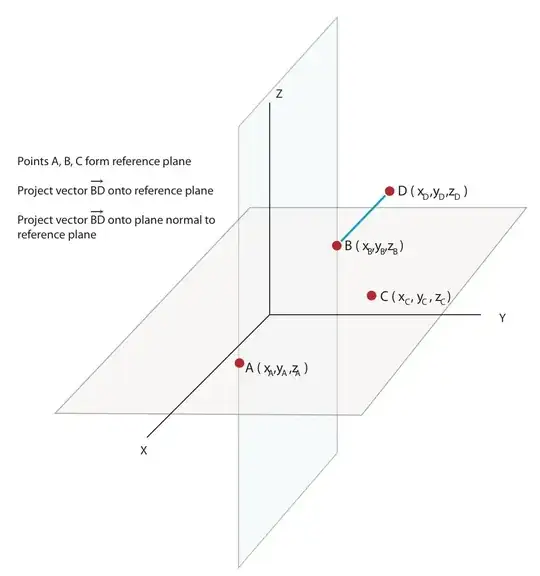
The formula to project a vector onto a plane.
"Let $\vec{F}\left(\mathbf{\vec{v}},i,\mathbf{\vec{X}}_{i,j}\right)$ be the orthogonalization of $\mathbf{\vec{v}}$ compared to $\mathbf{\vec{X}}_{i,1}$ about $\mathbf{\vec{X}}_{i,2}$."
$
\therefore\forall \mathbf{\vec{v}}\exists\mathbf{\vec{X}}\left(\mathbf{\vec{X}}\in\left\{\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)},\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)}\right\}\implies\vec{F}\left(\mathbf{\vec{v}},i,\mathbf{\vec{X}}_{i,j}\right)=\mathbf{\vec{v}}-\text{Proj}_{\left(\mathbf{\vec{X}}_{i,1}-\mathbf{\vec{X}}_{i,2}\right)}\left(\mathbf{\vec{v}}-\mathbf{\vec{X}}_{i,2}\right)\right)
$
the traced codomain of $\vec{F}$ of a traced random $\mathbf{\vec{v}}$ about one instance of $\mathbf{\vec{X}}$.
"A reference plane formed by 3 points in $\mathbb{R}^3$."
Let plane $\mathbf{P}$ be a binary tuple of a normal constructor $\vec{\text{C}}$ using planer point(s) $\mathbf{\vec{p}}\in\mathbf{V}$:
$\mathbf{P}=
\left(\vec{\text{C}}\left(\mathbf{\vec{p}}\right),\mathbf{\vec{p}}\right)\iff\left(\mathbf{\vec{n}}=\vec{\text{C}}\left(\mathbf{\vec{p}}\right)\implies
\mathbf{P}\overset{\text{def}}{=}\forall\mathbf{\vec{v}}\left(\left(\mathbf{\vec{n}}-\mathbf{\vec{0}}\right)\cdot\left(\mathbf{\vec{v}}-\mathbf{\vec{p}}\right)=0\right)\right);$
$\mathtt{\text{Let }}\mathbf{V}=\left\{\vec{A},\vec{B},\vec{C}\right\};$
Let $\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}$ is an array data structure that contains all possible implementations of planes using all vectors in $\mathbf{V}$ given $\mathbf{P}$.
$$
\mathtt{\text{Let }}\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}=
\begin{bmatrix}
\left(\frac{(\vec{A}-\vec{C}) \times (\vec{B}-\vec{C})}{\Vert(\vec{A}-\vec{C}) \times (\vec{B}-\vec{C})\Vert}+\vec{C}, \vec{C}\right) \\
\left(\frac{(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})}{\Vert(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})\Vert}+\vec{B}, \vec{B}\right) \\
\left(\frac{(\vec{B}-\vec{A}) \times (\vec{C}-\vec{A})}{\Vert(\vec{B}-\vec{A}) \times (\vec{C}-\vec{A})\Vert}+\vec{A}, \vec{A}\right) \\
\left(\frac{(\vec{B}-\vec{C}) \times (\vec{A}-\vec{C})}{\Vert(\vec{B}-\vec{C}) \times (\vec{A}-\vec{C})\Vert}+\vec{C}, \vec{C}\right) \\
\left(\frac{(\vec{C}-\vec{B}) \times (\vec{A}-\vec{B})}{\Vert(\vec{C}-\vec{B}) \times (\vec{A}-\vec{B})\Vert}+\vec{B}, \vec{B}\right) \\
\left(\frac{(\vec{C}-\vec{A}) \times (\vec{B}-\vec{A})}{\Vert(\vec{C}-\vec{A}) \times (\vec{B}-\vec{A})\Vert}+\vec{A}, \vec{A}\right)
\end{bmatrix};
$$
Example:
$$\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2}=\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2,j}=\left(\frac{(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})}{\Vert(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})\Vert}+\vec{B}, \vec{B}\right);$$
$$\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2,1}=\frac{(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})}{\Vert(\vec{A}-\vec{B}) \times (\vec{C}-\vec{B})\Vert}+\vec{B};$$
$$\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2,2}=\vec{B};$$
"The plane orthogonal to the reference plane at $\vec{AB}$."
Let $\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)}$ inherit the definition of $\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}$, but redefines the normal constructor $\vec{\text{C}}\left(\mathbf{\vec{p}}\right)$ implemented in $\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}$.
$$
\mathtt{\text{Let }}\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)} =
\begin{bmatrix}
\left(\frac{\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2,1}-\vec{B}\right)\times(\vec{A}-\vec{B})}{\Vert\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{2,1}-\vec{B}\right)\times(\vec{A}-\vec{B})\Vert}+\vec{B}, \vec{B}\right) \\
\left(\frac{\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{3,1}-\vec{A}\right)\times(\vec{B}-\vec{A})}{\Vert\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{3,1}-\vec{A}\right)\times(\vec{B}-\vec{A})\Vert}+\vec{A}, \vec{A}\right) \\
\left(\frac{\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{5,1}-\vec{B}\right)\times(\vec{C}-\vec{B})}{\Vert\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{5,1}-\vec{B}\right)\times(\vec{C}-\vec{B})\Vert}+\vec{B}, \vec{B}\right) \\
\left(\frac{\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{6,1}-\vec{A}\right)\times(\vec{C}-\vec{A})}{\Vert\left(\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{6,1}-\vec{A}\right)\times(\vec{C}-\vec{A})\Vert}+\vec{A}, \vec{A}\right)
\end{bmatrix};
$$
Project $\vec{BD}$ onto the reference plane for any $i \in [1,6]$ at $R\left(i\right)$:
$$
\mathtt{\text{Let }}R\left(i\right)=\begin{Bmatrix}
\vec{D}_r=\vec{F}\left(\vec{D},i,\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{B}_r=\vec{F}\left(\vec{B},i,\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{A}_r=\vec{F}\left(\vec{A},i,\mathbf{\vec{R}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{BD}_r=\vec{D}_r-\vec{B}_r, \\
\vec{AB}_r=\vec{B}_r-\vec{A}_r
\end{Bmatrix};
$$
Project $\vec{BD}$ onto the orthogonal plane for any $i \in [1,4]$ at $O\left(i\right)$:
$$
\mathtt{\text{Let }}O\left(i\right)=\begin{Bmatrix}
\vec{D}_{o}=\vec{F}\left(\vec{D},i,\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{B}_{o}=\vec{F}\left(\vec{B},i,\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{A}_{o}=\vec{F}\left(\vec{A},i,\mathbf{\vec{O}_{\mathbf{V}}\left(P\right)}_{i,j}\right), \\
\vec{BD}_{o}=\vec{D}_{o}-\vec{B}_{o}, \\
\vec{AB}_{o}=\vec{B}_{o}-\vec{A}_{o}
\end{Bmatrix};
$$
The angle between the projection of $\vec{AB}$ and $\vec{BD}$.
while projected onto the orthogonal plane:
$\theta_{A_{o},D_{o}}=\arccos\left(\frac{\vec{AB}_{o}\cdot\vec{BD}_{o}}{\Vert\vec{AB}_{o}\Vert\Vert\vec{BD}_{o}\Vert}\right)\implies\theta_{a_{o},d_{o}}=
\arccos\left(\frac{\left(\vec{B}_{o}−\vec{A}_{o}\right)\cdot\left(\vec{D}_{o}−\vec{B}_{o}\right)}{\Vert\vec{B}_{o}-\vec{A}_{o}\Vert\Vert\vec{D}_{o}−\vec{B}_{o}\Vert}\right);$
while projected onto the reference plane:
$
\theta_{A_{r},D_{r}}=\arccos\left(\frac{\vec{AB}_{r}\cdot\vec{BD}_{r}}{\Vert\vec{AB}_{r}\Vert\Vert\vec{BD}_{r}\Vert}\right)\implies\theta_{a_{r},d_{r}}=
\arccos\left(\frac{\left(\vec{B}_{r}−\vec{A}_{r}\right)\cdot\left(\vec{D}_{r}−\vec{B}_{r}\right)}{\Vert\vec{B}_{r}-\vec{A}_{r}\Vert\Vert\vec{D}_{r}−\vec{B}_{r}\Vert}\right);
$
{kind=link}