It is a tedious, straight and narrow clarification of concepts, but still helps.
When we discretize a continuous dynamical system/ODE ${\bf y}' = {\bf F}(t,{\bf y})$, where ${\bf y}={\bf y}(t)$ is a function of $t$,
e.g. using the Euler method, into a discrete dynamical system/difference equation ${\bf y}_{n+1}= {\bf f}({\bf y}_n)$, where ${\bf y}_n$ is a sequence of $n$,
can we still calculate the Lyapunov spectrum
(i.e. does the Lyapunov spectrum in general exist for difference equations, and if so what is the physical significance)?
If so, how? To still use the Jacobian of ${\bf f}$, form an Oseledets matrix and calculate its eigenvalues?
Since a discrete dynamical system is still a dynamical system with possible occurrence of chaos, and the Lyapunov spectrum is to characterize the chaos, i.e. the (locally) exponential expansion of perturbations, it could be still properly defined for the discrete system. The difference is that here we study the evolution of $\delta {\bf y}_n$ (perturbations of a sequence, of the recurrent relation), instead of $\delta {\bf y}(t)$ (perturbations of a function, i.e. of the integral curve for the continuous ode),
and $\delta {\bf y}_n$ being a numerical approximation of $\delta {\bf y}(t)$, is NOT the exact stroboscopic representation of the latter (i.e. not $\delta {\bf y}(t_n)$, (where $t_n$ is the consistent, shared time sequence for both systems, and therefore $\delta {\bf y}_n$ is exactly at $t_n$,) but deviates from the latter.
So we are studying a different (though approximate), NOT stroboscopically representing, dynamical system, and its perturbation evolution with LEs.
Here is an illustration for ${\bf y}_n, {\bf y}(t) \in \mathbb{R}^2.$ The points of same color denote the same time.

Note that the tangent for the discrete system at $t_n$ is NOT ${\bf F}(t_n,{\bf y}(t_n))$ (about the function value y), but ${\bf F}(t_n,{\bf y}_n)$ (about the sequence y), according to the definition of the Euler method$^1$; and so the tangents at the points of the same color are, actually, different (the same t, F, but different y, so different F(t,y); the equs 1.1, 1.4 are from Iseries's book, the right side of which are ${\bf F}, {\bf f}$ above respectively--to clarify the difference between the notations here and thereof).


(Non-bold f (the right side of the continuous), F (the right side of the discrete), y above are less strict notations. $t_n, t$ are the same as long as they equal; there is only one time-(real)numbering system here.)
Q: should we use the Jacobian of F or f (= $y_n$ + hF) (where h = $t_{n+1}-t_n$ is the time step) for computing the LEs of the discrete dynamical system? It seems to matter. Though f is the right side of the difference equation, F seems to be the actual function that determines the time evolution and that corresponds to the original, continuous dynamical system. Since we are comparing (LEs of) the two systems, we should use F?
I.e. LEs are computed from Jacobian, but of which function should the Jacobian be, for a discrete dynamical system (difference equation)?
Three ideas (not sure about their validity):
If we use f for Jacobian, then (considering the simplest 1d case) we get $y_{n+1} = f(y_n) + A y_n = Ay_n$, then $y_n = C A^n = C e^{n\ln A}$. No matter such a choice of Jacobian is proper or not, we get the same (local) exponential growth (of $y_{n}$, NOT $\delta y_{n}$. -$^2$) as that in the continuous system.
For constant time step h, $t_n = nh$, $y_{n+1}$ (roughly y at t) $= C e^{t \frac{\ln A}h}$, compared with the solution of the linearized ODE, $y = e^{A t}$, a proper choice of Jacobian seems to be $D_t=\frac{\ln A}h=\frac{\ln (J_f)}h$, where $J_f$ is the Jabobian of f (at t). Then we compute the Oseledets $\Lambda = \lim_{t\to \infty}(T_t^T T_t)^{\frac 1 {2t}}, T_t = D_{t-1}\dots D_0. -^3$The Euler method can be written as $\frac {y_{n+1}-y_n}h=F(t_n,y_n)$, so perhaps we should use the Jacobian of F. Then h in the left side is not taken into consideration, not sure if it is fine.
We start from the definition. LEs are defined as the time average of the exponent of perturbation growth (the growth is assumed to be exponential because near a fixed point the dynamical system can be linearized; note we should consider if the linearization is done near a fixed point;$^4$ note the linearization, as a Taylor expansion, may be invalid if we go too far from the fixed point), i.e.$\lambda=\frac {\ln \delta y_{n+1}- \ln \delta y_{n}}h$. We need to consider the discretization of two integral curves/solutions. Issues such as [1] exist for both curves. Looks complicated.
$\\$
[2] How could we, if possible, get the (local) exponential growth of the latter?
A possible answer (Soriano, A Method for Lyapunov Spectrum Estimation using Cloned Dynamic):

We simply use Taylor expansion for $f(t, y+\delta y)$. Besides, note that in contrast with my thought above [3], no fixed point is required for the linearization of the system for the definition of LEs; for the none-derivative first term in the Taylor expansion is eliminated using the recurrent relation $y_{n+1}=f(y_n)$, not the fixed point $y = f(y)$.
[3] Thoughts become fuzzy here. The overall idea is that perhaps we should use $\ln$ of the Jacobian of f.
Q: should we, and how to define $\ln$ of a matrix $A$ (say $B$) in this context, such that, $A = e^B=1+B +\frac {B^2}{2!} + \dots$?
https://en.wikipedia.org/wiki/Logarithm_of_a_matrix Finding the logarithm of a matrix?
The following excerpt from ch6 of Glendinning's book supports my guess:

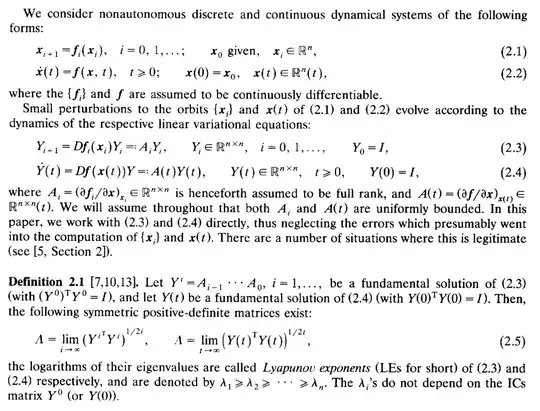
However, the excerpt of Soriano's paper, as well as Def 2.1 in Dieci, 1995 below seems to suggest that we use the Jacobian of f for defining LEs.
$\\$