Not a complete solution, but the ideas are there...
Your vector equation, that I write with barycentric coordinates $b_1,b_2$ replaced by $x,y$:
$$v_1\cdot x + v_2 \cdot y + v_3 \cdot (1 - x - y) + k \cdot (n_1\cdot x + n_2 \cdot y + n_3 \cdot (1 - x - y)) = p$$
is equivalent to 3 scalar equations from which we can, for each of them, "extract" $k$ under the following (still equivalent) form :
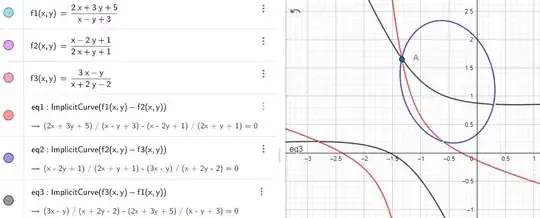
$$k=\underbrace{\dfrac{ax+by+c}{dx+ey+f}}_{f_1(x,y)}=\underbrace{\dfrac{gx+hy+i}{jx+ky+l}}_{f_2(x,y)}=\underbrace{\dfrac{mx+ny+o}{px+qy+r}}_{f_3(x,y)}\tag{1}$$
with known coefficients $a,b,\cdots q,r$.
Otherwise said,
$$\begin{cases}f_1(x,y)&=&f_2(x,y)\\ f_2(x,y)&=&f_3(x,y)\\ f_3(x,y)&=&f_1(x,y)\end{cases}\tag{3}$$
These three 2nd degree equations represent conic curves. Please note that the third equation is redundant ; in fact it will be useful to select among the solutions to the system formed by the two first equations
Therefore, your issue amounts to find the intersection(s) of 2 conic curves.
Here is an example of (2) obtained with Geogebra (the coefficients have been arbitrarily chosen...) with a single solution (the intersection point of an ellipse and two hyperbolas) ; please note that if consider only two of the 3 conic curves, we have two solutions.
Now, out of that, which kind of strategy of resolution can we adopt ? I see two of them:
either apply two-dimensional Newton-Raphson's method with its efficiency but as well its known drawbacks, mainly the difficulty to find a good initialization point (maybe you can orthogonaly project point $P$ on the triangle for having this initial point ?).
or get the 4th degree equation (degree $2 \times$ degree $2$ = degree $4$) verified by variable $x$ by elimination of $y$ between the 2 first equations of (1). See the answer here for that. In fact, one can work with a 3rd degree equation as shown in this answer. Once a solution $x^*$ has been obtained, just plug $ x=x^*$ into the equations in (1) to get quadratic equations for variable $y$ giving solution(s) $y=y^*$. Plugging $x=x^*$ and $y=y^*$ in any of the two relationships (1) gives the value of $k$.
Which of the two methods is the best one ?
The advantage of the second method is that you shouldn't be exposed to particular cases where Newton's method can "wander" instead of finding the root.
Edit (2022-04-22): There is a possible simplification of fractions (1).
It rests on the fact that, when 3 fractions are equal, they are equal to any other fraction whose numerator and denominator are barycentric combinations of the numerators and denominators of the 3 initial fractions .
The corresponding formula: for (almost) any constants $u,v,w$ :
$$\frac{A}{B}=\frac{C}{D}=\frac{E}{F}=\frac{uA+vC+wE}{uB+vD+wF}$$
In our case, considering (1), it is equal to:
$$k=\dfrac{u(ax+by+c)+v(gx+hy+i)+w(mx+ny+o)}{u(dx+ey+f)+v(jx+ky+l)+w(px+qy+r)}=\dfrac{uc+vi+wo}{u(dx+ey+f)+v(jx+ky+l)+w(px+qy+r)}\tag{3}$$
the second fraction has a purely numerical numerator if we choose $u,v,w$ in such a way that the $x$ and $y$ terms disappear ; this is always possible because equations:
$$\begin{cases}ua+vg+wm&=&0\\ub+vh+wn&=&0\end{cases}$$
have a solution ($(u,v,w)$ proportional to cross product of $(a,g,m)$ and $(b,h,n)$);

