I would like to present a more geometric perspective on this, based on my answer given here: https://math.stackexchange.com/a/4304117/322997
Vectors can be thought of as representing (hyper)planes. For example, in 3D space a vector can be used to represent a plane through the origin. Now, a plane $u$ can be reflected in a plane $v$ using
$$ v[u] = -vuv^{-1}, $$
where the minus sign is needed such that when you reflect $v$ in itself, the front and back of the mirror flip ($v[v] = -v$). If we now also perform a reflection in a second plane $w$, we get the rotation
$$ w[v[u]] = (wv)u v^{-1} w^{-1} = (wv) u (wv)^{-1} $$
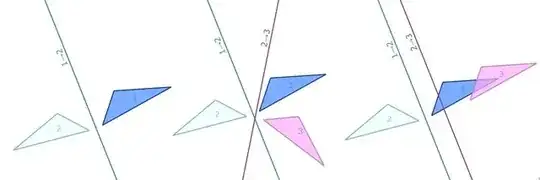
The composition of two reflections $wv$ is called a bireflection, and could in fact be either a rotation, translation, or a boost. The picture below shows how two intersecting reflections form a rotation, while parallel reflections form a translation.
So the product of two vectors is a bireflection.
The "apples and oranges" of scalar plus bivector only appear because in order to actually compute it, we would have to somehow choose a basis. Staying with the 3D example, we could choose an orthogonal basis $e_1, e_2, e_3$ such that $e_i e_j = \delta_{ij} + e_{ij}$ and represent any plane as $x = \sum_i x^i e_i$.
Now, when we compute the bireflection $wv$ we will get a scalar and bivector part:
$$ w v = \sum_{ij}(w^i e_i) (v^j e_j) = \sum_i w^i v^i + \sum_{i \neq j} w^iv^j e_{ij}. $$
So just remember the truth: there are no apples and oranges. This works in any number of dimensions: the vectors of a geometric algebra $\mathbb{R}_{p,q,r}$ form the reflection group $Pin(p,q,r)$. And while it is possible to add $k$-vectors to form arbitrary multivectors, their geometric validity is debatable. When you do purely algebra, you can make any number come out of any hole. But if you make sure to follow the geometry where it leads you, you'll find there is nothing mysterious about the multivectors you end up with.
For more detail on this approach I would refer to this video, or to the Graded Symmetry Groups paper. Full disclaimer: I'm one of the authors.
