As an aside, while it is "ротор" in Russian (basically "rotor") and it's sometimes written $\mathop{\rm rot}\vec A$, this quantity would usually be called "curl" in English (and perhaps very occasionally "rotation" or "rotational", but probably never "rotor").
Your question was initially about curl, but it seems the main thing you are having trouble grasping is the meaning of a partial derivative of "the wrong" component, like $\dfrac{\partial A_x}{\partial y}$, where $\vec A=\left\langle A_x,A_y,A_z\right\rangle$.
It's important to keep in mind that for a particular piece of a vector field $\vec A$, there are not just three numbers to worry about ($A_x, A_y,A_z$), but actually $6$: the three inputs are important too. And things like partial derivatives and curl measure sensitivity to changes in input.
So we have something more like $\vec A(a,b,c)=\left\langle A_x,A_y,A_z\right\rangle=\left\langle A_x(a,b,c),A_y(a,b,c),A_z(a,b,c)\right\rangle$. $\dfrac{\partial A_x}{\partial y}$ then measures how much the $x$-component of the output changes with a small change to $b$, the $y$-component of the input. The $A_z$ displayed in the picture in the OP only shows the value of $A_z$ for a particular input $(a,b,c)$. And to approximate the derivative $\dfrac{\partial A_x}{\partial y}$, we need to look at both $(a,b,c)$ and $(a,b+h,c)$ for a small value of $h$.
We can look at this situation pictorially in this example:
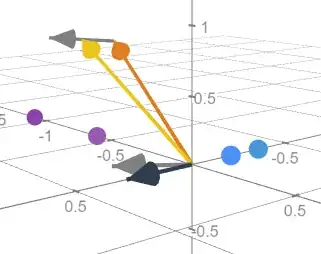
There are two vectors from a vector field $\vec A(x,y,z)$ floating off in space (not shown) positioned with tails at $(a,b,c)=(?,-1.1,?)$ and $(a,b+h,c)=(?,-1.1+0.5,?)=(?,-0.6,?)$. You can see the $y$-coordinates of the tails/inputs marked in purple on the $y$-axis.
Those vectors have been translated to have tails at the origin as orange and yellow vectors (with yellow corresponding to $\vec A(a,b+0.5,c)$). The $x$-coordinates of these outputs are displayed as blue points on the $x$-axis.
The difference quotient $\dfrac{\vec A(a,b+0.5,c)-\vec A(a,b,c)}{0.5}$ is displayed as a gray vector with its tail at the head of the orange vector (which corresponds to $\vec A(a,b,c)$). This grey vector is also translated to have its tail at the origin, representing an approximation to $\dfrac{\partial \vec A(x,y,z)}{\partial y}$ at $(a,b,c)$.
Finally, we look at the projection of this gray vector onto the $x$-axis to see the $x$ component: an approximation to $\dfrac{\partial \vec A_x(x,y,z)}{\partial y}$ at $(a,b,c)$.
You can vary the perspective, values, and function in this math3d interactive.

{kind=link}