A classical 3rd order method
As an example method use the Heun 3rd order method (Karl Heun 1900)
\begin{array}{l|lll}
0&\\
\frac13&\frac13\\
\frac23&0&\frac23\\
\hline
&\frac14&0&\frac34
\end{array}
with the code
def Heun3integrate(f, t, y0):
dim = len(y0);
y = np.zeros([len(t),dim]);
y[0,:] = y0;
k = np.zeros([4,dim]);
for i in range(0,len(t)-1):
h = t[i+1]-t[i];
k[0,:] = f(t[i], y[i]);
k[1,:] = f(t[i]+h/3, y[i]+h/3*k[0]);
k[2,:] = f(t[i]+2*h/3, y[i]+2*h/3*k[1]);
y[i+1,:] = y[i]+h/4*(k[0]+3*k[2]);
return y
Test using the method of manufactured solutions (MMS)
To verify the correctness of the implementation one can use the idea of manufactured solutions to generate a test problem $F[y]=F[p]$ with known exact solution $p$, like in $F[y]=y''+sin(y)$, $p=\sin t$, that is,
$$
y''+\sin(y) = -\sin(t)+\sin(\sin(t)), ~~ y(0)=p(0)=\sin(0)=0,~ y'(0)=p'(0)=\cos(0)=1
$$
def mms_ode(t,y): return np.array([ y[1], sin(sin(t))-sin(t)-sin(y[0]) ])
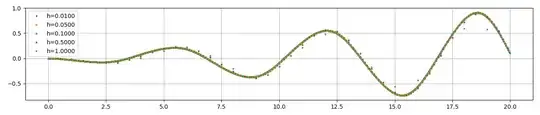
to get a plot for the error profiles in $y$. To compare a variety of step sizes, scale the error by $h^{-3}$ so that the plot in principle shows the leading error coefficients of the global error over time. If the single graphs appear to be converging to a single function, this confirms the third order. If the third order assumption were wrong one would expect wildly differing scales due to the wrong exponent of $h$.
for h in [1.0, 0.5, 0.1, 0.05, 0.01][::-1]:
t = np.arange(0,20,h);
y = Heun3integrate(mms_ode,t,[0,1])
plt.plot(t, (y[:,0]-np.sin(t))/h**3, 'o', ms=2, label = "h=%.4f"%h);
plt.grid(); plt.legend(); plt.show()
Et voi-la
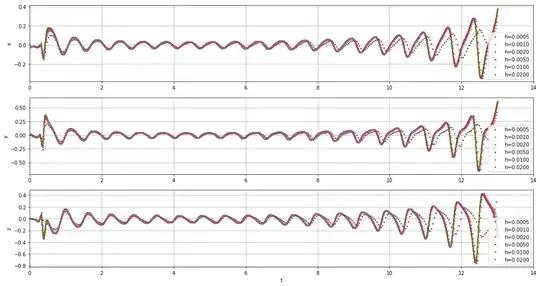
Test on the Lorenz system via step doubling
There is no exact solution of the Lorenz system to use as reference. To still get an error estimate, compute a second solution with double the step size and use Richardson extrapolation to compute the error estimate.
t1 = np.arange(0,tf,h);
u1 = Heun3integrate(Lorenz,t1,[1,1,1])
t2 = t1[::2]
u2 = Heun3integrate(Lorenz,t2,[1,1,1])
err = (u2[:,:]-u1[::2,:])/7
err is the error for the step size h, even if it uses the time scale t2. Then as before plot the error profiles, now scaled by $(h/h_0)^{-3}$ so that the scale is exact for the largest step size, and by $(t+h)^{-1}$ to account for the continuing error accumulation. The plots again show convergence to the same profile curve. The time interval however is rather small for the Lorenz attractor. To get the typical picture one needs at least an integration interval of length $50$. That however will lead to rapidly increasing amplitude of the error profile curve and larger influence of the nonlinear, chaotic nature of the system to the computed trajectories, making them diverge for the different step sizes.