I'm teaching myself linear algebra trying to write a 3D script. Mostly relying on Khan Academy for revising math itself, and supplementing with 3D graphics blogs, websites, etc.
I got as far as using matrix multiplication to perform compound rotations (say in 3 axes, depending on 3D package's convention for rotation order), but now I'm trying to understand concatenating a rotation and a translation.
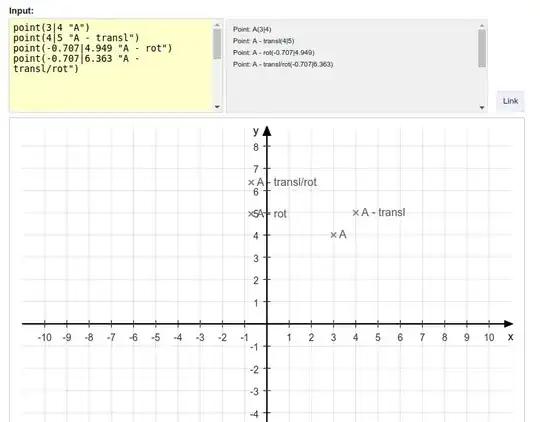
I did this example in 2D (3D homogeneous space) for simplicity of graphing.
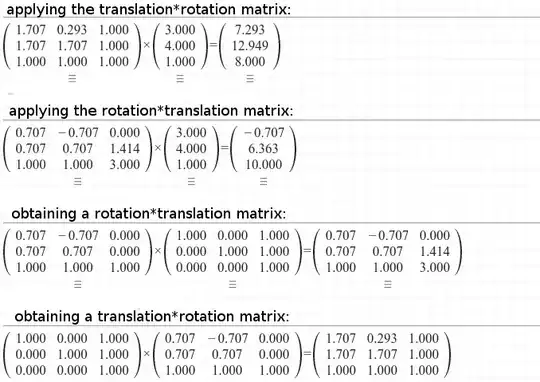
Working from Wikipedia (Translation: Matrix representation [see disclaimer at bottom]) I understand I need to convert my vectors to homogeneous space with w = 1, and multiply by the translation matrix T.
This works for only translation (T) and for rotation*translation (R * T). But produces garbage for T * R. As you can see in my graph and calculations, I would expect A' = TRA somewhere around [0.3,6] point but it is not.
What am I missing? I'd appreciate pointing me in the right way.
(^In afterthought: I labelled operations in the order of reading, so "A - transl/rot" is technically actually: R * T * A )
Many Thanks.