You need to better understand the relation between translation and a pair of reflections. Let's for the moment assume you have two vertical lines of reflection, one at $x=a$ and one at $x=b$. The first maps a point $(x,y)$ to $(a-(x-a),y)=(2a-x,y)$, the latter takes that to $(2b-(2a-x),y)=(x+2(b-a),y)$ so it is a translation by $2(b-a)$ in the $x$ direction. What can you learn from this? On the one hand, the distance of the translation is twice the distance between the lines of reflection, and the direction of the translation is perpendicular to the direction of the lines of reflection. You can also see that the translation is oriented in such a way that it moves from the first reflection towards the second reflection. Now apply this to your situation.
That said, the combination of a glide reflection and a simple reflection is an orientation preserving isometry, and as such is either a translation or a rotation (unless it's the identity), which can be represented using two lines only. So you can pick some points, apply your transformations and use the result to distinguish the cases and find the direction of translation, or the center and angle of rotation.
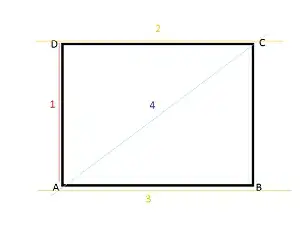
Or you do this with formulas:
\begin{align*}
\rho_{DA}:(x,y)&\mapsto(-x,y) \\
\tau_{DA}:(x,y)&\mapsto(x,y-2) \\
\rho_{AC}:(x,y)&\mapsto(y,x) \\
\rho_{AC}\circ\tau_{DA}\circ\rho_{DA}:(x,y)&\mapsto(y-2,-x)
\end{align*}
Then you can look for fixed points: a point $(x,y)$ which maps to itself. If you find one, it's the center of rotation. If not, it must be a translation. But does that look like a translation to you?