Suppose I have a point in the green coordinate system, and I wish to describe it in reference to the orange coordinate system. I know the roll, pitch, and yaw of the green system with respect to the orange system. I also know the x,y,z values of a point in the green system and wish to get (x',y',z') which is the point values with respect to the orange system. How would I do so?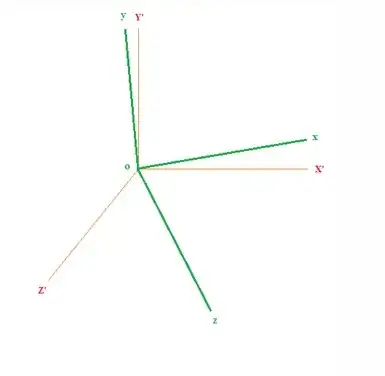
If it is possible to solve this with rotational transformation matrices I would like to know the procedure. I am aware of the rotational transformations for roll, pitch and yaw, but the output value differs based on the order of these matrices since matrix multiplication is non-commutative. Is there a way to get (x',y',z') with just the information that I've given? I don't mind not using rotational transformation matrices as long as I can get the output with only the roll pitch and yaw given.