C++ Code
Here is a quasi-branchless and very robust version written in C++:
ray_intersection intersect(vec3 origin, vec3 direction, vec3 box_min, vec3 box_max) {
vec3 t0 = (box_min - origin) / direction;
vec3 t1 = (box_max - origin) / direction;
vec3 min = ray_box_min(t0, t1); // entry points per plane
vec3 max = ray_box_max(t0, t1); // exit points per plane
double t_min = std::fmax(std::fmax(min.x, min.y), min.z);
double t_max = std::fmin(std::fmin(max.x, max.y), max.z);
return { t_min, t_max };
}
This also requires the use of two utility functions:
double ray_box_min(double x, double y) {
return std::isnan(x) || std::isnan(y) ? -inf : std::fmin(x, y);
}
double ray_box_max(double x, double y) {
return std::isnan(x) || std::isnan(y) ? +inf : std::fmax(x, y);
}
vec3 ray_box_min(vec3 a, vec3 b) {
return { ray_box_min(a.x, b.x), ray_box_min(a.y, b.y), ray_box_min(a.z, b.z) };
}
vec3 ray_box_max(vec3 a, vec3 b) {
return { ray_box_max(a.x, b.x), ray_box_max(a.y, b.y), ray_box_max(a.z, b.z) };
}
Explanation
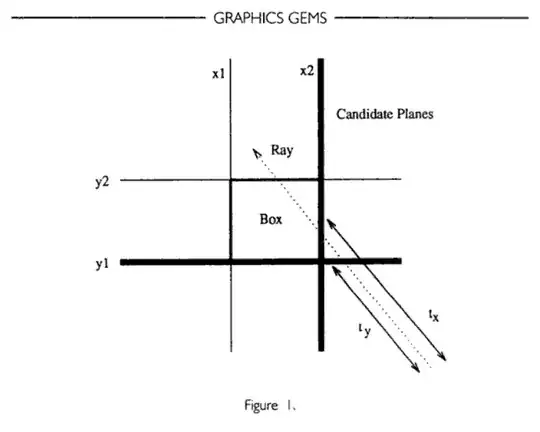
This implements the well-known Slab method.
All operations including / and min/max are component-wise when applied to vectors in this code.
We cannot use regular std::fmin but must use a custom ray_box_min for numerical stability. If the ray origin is inside a box plane and the ray direction is parallel to the box plane, the first division yields NaN. We replace this with -inf and +inf depending on the operation. This results in the value getting replaced by others when computing t_min or t_max.
If you can guarantee that the ray origin is outside the box, you can use a regular component-wise min and max instead of the ray_box_ variants.
Interpreting the results
t_min is the furthest entry pointt_max is the closest exit point
From these values, we can obtain all sorts of properties:
- If
t_min <= t_max, the intersection is not a miss.
- If also
t_min > 0, the intersection is completely in front.
- If also
t_max < 1, the intersection is completely behind.
- If also
t_min < 0 && t_max > 0, the ray origin is inside the box.
- If
t_min is NaN or t_max is NaN, the ray direction is the zero-vector.
- If
t_min == 0, the ray origin lies on the box surface.
- If
t_min == t_max, the box has no volume, or an edge or corner was hit. Either way, the intersection is a single point, not a line segment.